
AUV Task Planning
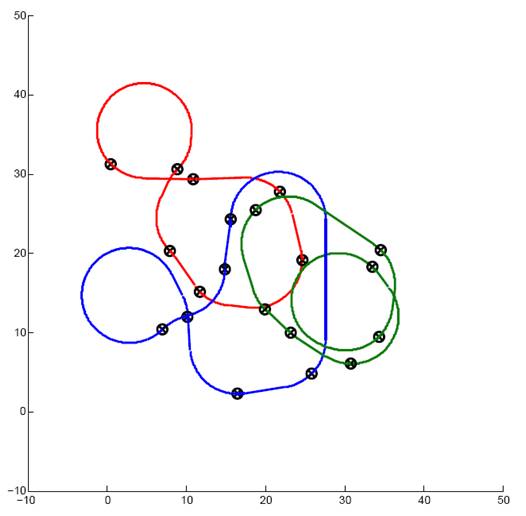
This work addresses the problem of allocating closely spaced targets to multiple autonomous underwater vehicles in the presence of constant ocean currents. The main difficultly of this problem is that the nonholonomic vehicles are constrained to move along forward paths with bounded curvatures. The proposed algorithm solves the task allocation problem with market-based auctions that minimize the total travel time to complete the mission.
By considering the dynamics and kinematics of the vehicle as well as the effect of ocean currents within the cost function, the proposed algorithm is able to create feasible paths with a lower cost when compared to solutions whose cost functions are calculated based solely on Euclidean distances.